
Bu에서 u가 존재하는 InHomgeneous한 LTI System을 다룬다.
scalar인 경우에 양변에 e^at를 다 곱하니 좌변은 e^-atx 의 미분한 결과 값이다. 이를 이용해 양변을 적분하고 식을 정리해서 전개하면 x(t)의 solution을 구할 수 있다.
input이 0일 때는 첫번째 항만 남아있는 것이고 2번쨰항은 input에 의해서 생기는 state의 dynamics라고 생각하면 된다.

기존에 y를 구하기 위해서 h(t) * u(t) 를 convolution 해서 결과 값을 구했었다. 마찬가지로
e^At == h(t) 가 되어 2번째 term이 convolution의 결과가 된다. 이를 particular solution이라고 한다.

Leibniz Integral Rule이 참이라고 가정하고 식을 전개한다.
x(t)의 양변을 미분 하고 f(t, tau) == pie(t- tau)Bu(tau) 로 가정하고 풀어나간다.
중요한것은 x(t) 의 solution값이 중요한것이고 위 과정은 그게 맞는지 미분을 해봄으로써 역으로 유도 한 것이다.

아래 youtube에서 일반적인 증명을 해준다. 위 사진에서도 3번째 오른쪽 밑에서 2번째가 일반적인 식인데 이떄 a는 상수 b는 t 라는 변수라고 놓으면 우리가 썼던 식으로 변한다.
https://www.youtube.com/watch?v=9yjE1_0mc2Y&ab_channel=BrainyNerdTutor

B1 이 왜나온거지 1이 아니라 2아닌가?
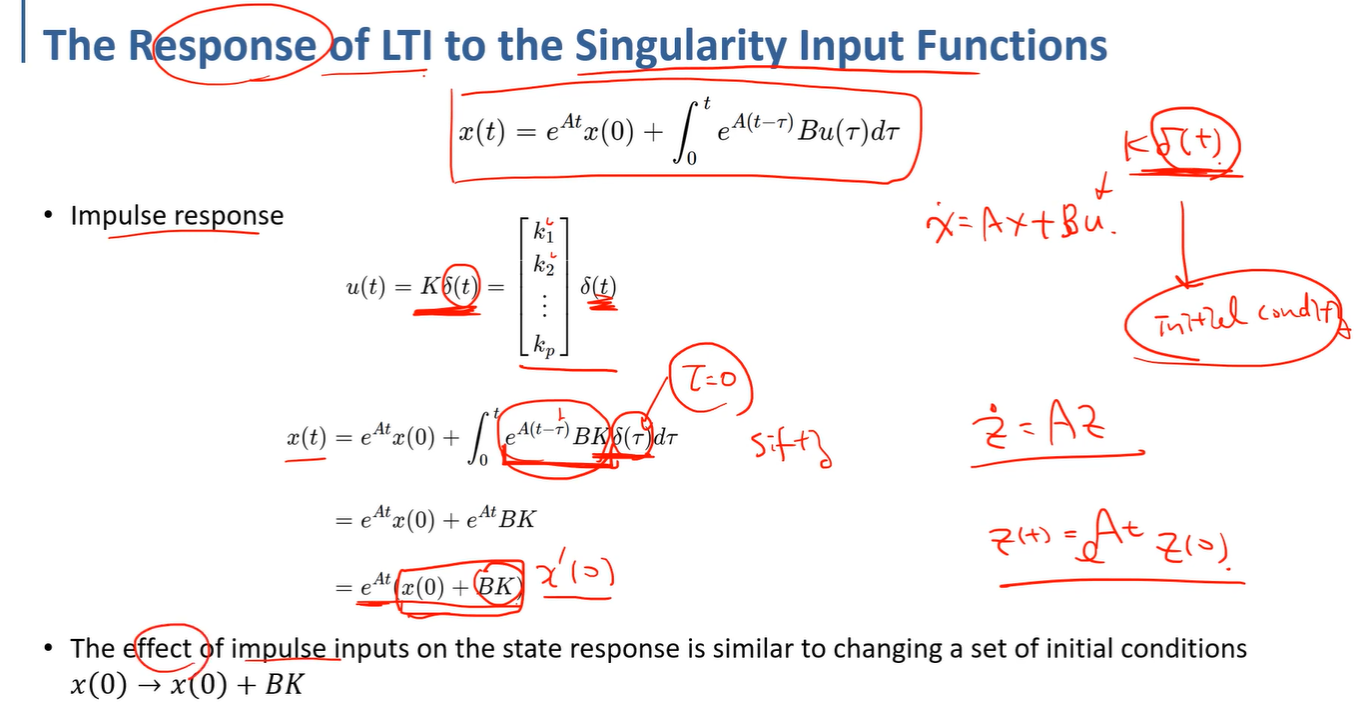
input이 diract function일 때 tau == 0이면 sift 되는 효과가 있다.
그러면 최종식이 e^At (x(0) + BK) 인데 이것은 기존의 x(t) homogenous solution의 inital condition 영역에 해당하는 부분이다.

좀더 general 한 step function input case를 살펴본다.
AB != BA 가 일반적인데 2중 하나가 exponential matrix이면 등식이 성립한다.
system이 stable하면 e^At가 0으로 수렴한다. 그럼 마지막 식이 의미하는게 뭐냐

system이 stable하다다는것은 transient response들은 0으로 수렴한다. (즉 미분 값들은 0으로 수렴하게 된다.)
cx' + kx = mg 로 설명되는데 이때 x'== 0 인 stable 한 state으로 갔을 때 mg/k 를 기준으로 진동하게 된다.
x1 = y를 두고 식을 전개하면 A, B, K 의 matrix들이 나오게 되는데 전 사진에서 이미 steady state의 값ㅇ르 아니 그대로 ㅓ전개해서 계산하면 mg/k 가 나오게 된다.
'AI > Dynamical Systems (동적시스템)' 카테고리의 다른 글
| 07 rep LTI 01 (선형 시불변 시스템 표현) (0) | 2024.03.15 |
|---|---|
| 06 state space 01 (상태 공간) (0) | 2024.03.10 |
| 05 Laplace transform 03 (라플라스 변환) (0) | 2024.03.02 |
| 05 Laplace transform 01, 02 (라플라스 변환) (0) | 2024.02.20 |
| 04 forced response 09 (강제 응답) (0) | 2024.02.10 |