1. 노드간 동기화 문제 해결 , 첫번쨰 메시지가 수신이 안되는경우
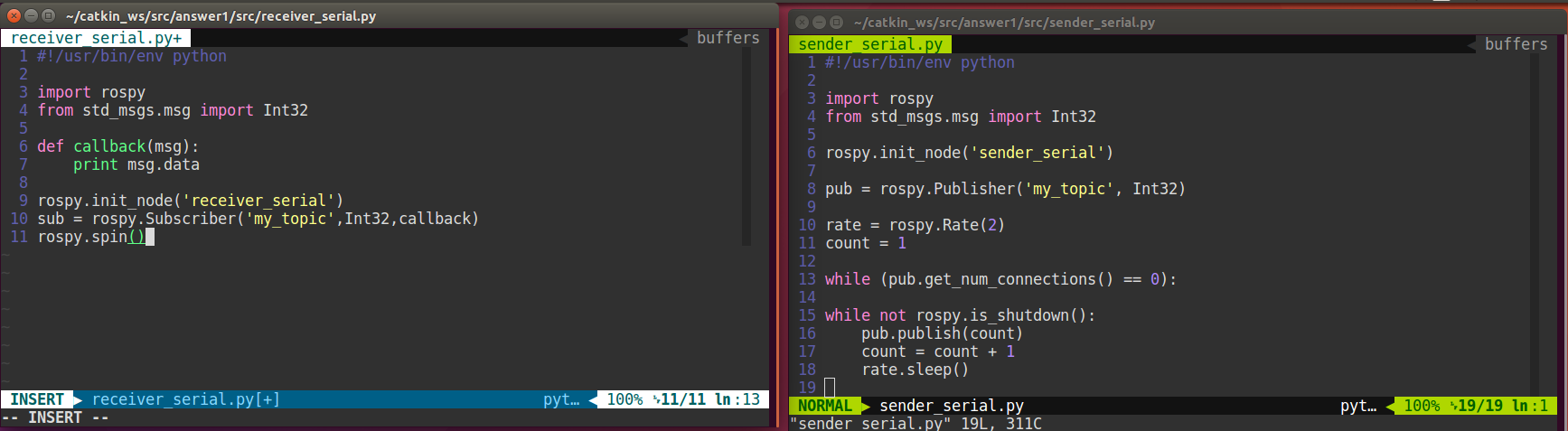
sender_serial.py 에서 pub.get_num_connection 을 통해서 1이 될떄까지 헛돌게 하면된다. 1:N의 통신도 마찬가지이다 3이될떄까지 헛돌게 하면된다.
2. 데이터 크기에 따른 전송속도는 어떻게 되는가?
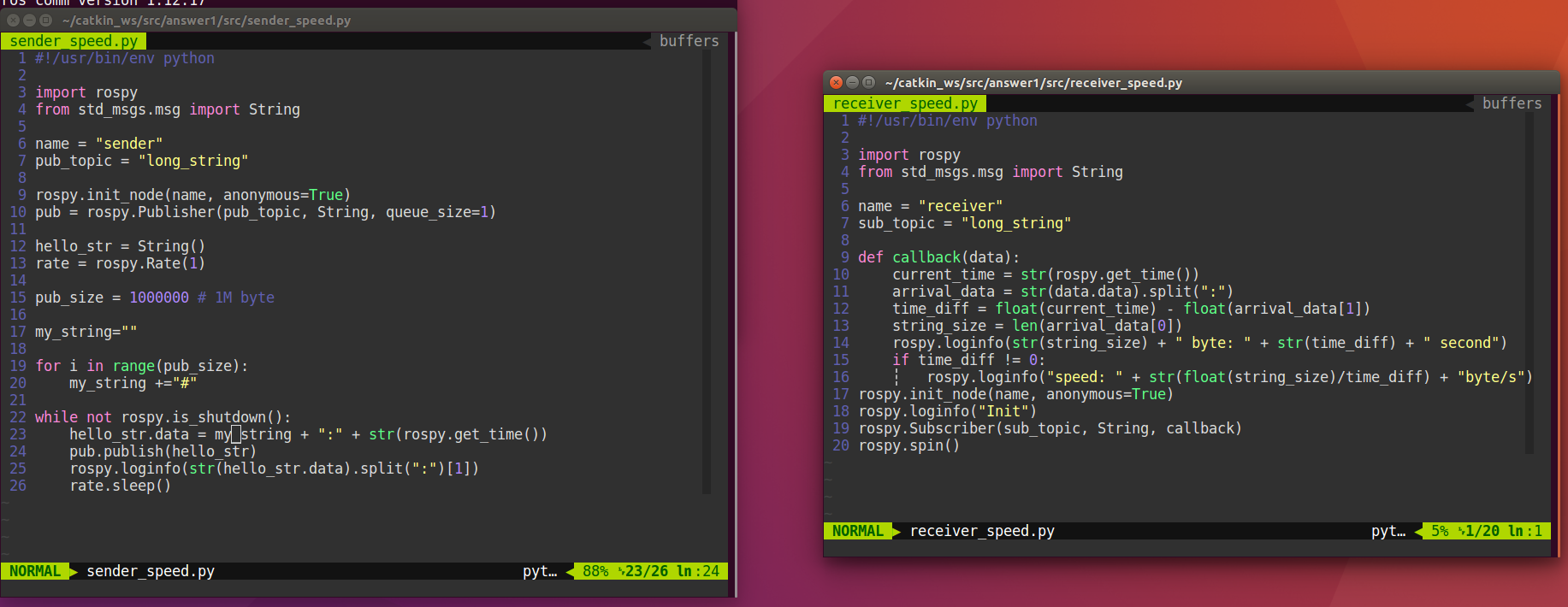

큰 파일을 보낼수록 속도는 늦어진다.
3. 도착하는 데이터를 미처 처리하지 못하면 어떻게 되는가?

subscriber 의 큐사이즈를 늘리면 아무리 publishing 이 빨라도 흘림없이 다 처리 할 수 있다.
4. 주기적 발송에서 타임슬롯을 오버하면 어떻게 되는가?

이런식으로 벗어나게 된다
5. ROS 노드의 순차 실행


while True 문에서 자신의 이름에 해당하는 메세지가 올떄까지 돌고있다가 인터럽트 방식으로 구독된 토픽이오면 OK string을 변경해줍니다. 이후에 조건이 d[0] == name이 된다면 while 문을 빠져나오고 msg를 publish하게 됩니다.
'자율주행 > ROS python (xytron 강의)' 카테고리의 다른 글
| 8자주행 odom coverter 과제 답안 (0) | 2021.01.12 |
|---|---|
| 자이카 ROS 패키지 (0) | 2021.01.07 |
| ROS day3 (0) | 2020.12.23 |
| ROS day2 (0) | 2020.12.22 |
| ROS day1 (0) | 2020.12.21 |