728x90
8자 거북이

자신만의 msseage data structure 를 쓰는방법
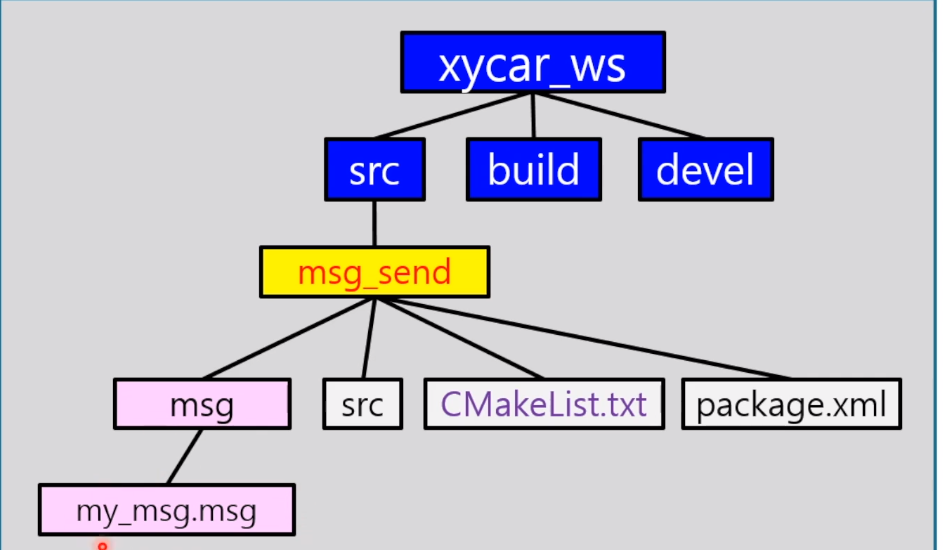
1 . xycar_ws/src 에서 catkin_create_pkg 를 통해서 msg_send를 만들어줍니다. 필요한 라이브러리들도 만들떄 추가해서 만들어줍니다.
2. mkdir msg 를 한후 안에다가 자신이 원하는 데이터 구조를 만들어줍니다.

3. package.xml 과 CMakeList.txt 를 ROS/Tutorials/CreatingMsgAndSrv - ROS Wiki 이곳을 참조하여 수정한다.
4. cm 으로 build를 해주고 추후에 python 에서 import 하여 써주면된다.

궁금하다 궁금해~
1. 누락없이 모두 잘 도착하는가?
2. 데이터 크기에 따른 전송속도는 어떻게 되는가?
3. 도착하는 데이터를 미처 처리하지 못하면 어떻게 되는가?
4. 주기적 발송에서 타임슬롯을 오버하면 어떻게 되는가?
5. 협업해야 하는 노드를 순서대로 가동시킬 수 있는가?
728x90
'자율주행 > ROS python (xytron 강의)' 카테고리의 다른 글
| 8자주행 odom coverter 과제 답안 (0) | 2021.01.12 |
|---|---|
| 자이카 ROS 패키지 (0) | 2021.01.07 |
| ROS 과제 답안 (0) | 2021.01.04 |
| ROS day3 (0) | 2020.12.23 |
| ROS day1 (0) | 2020.12.21 |