
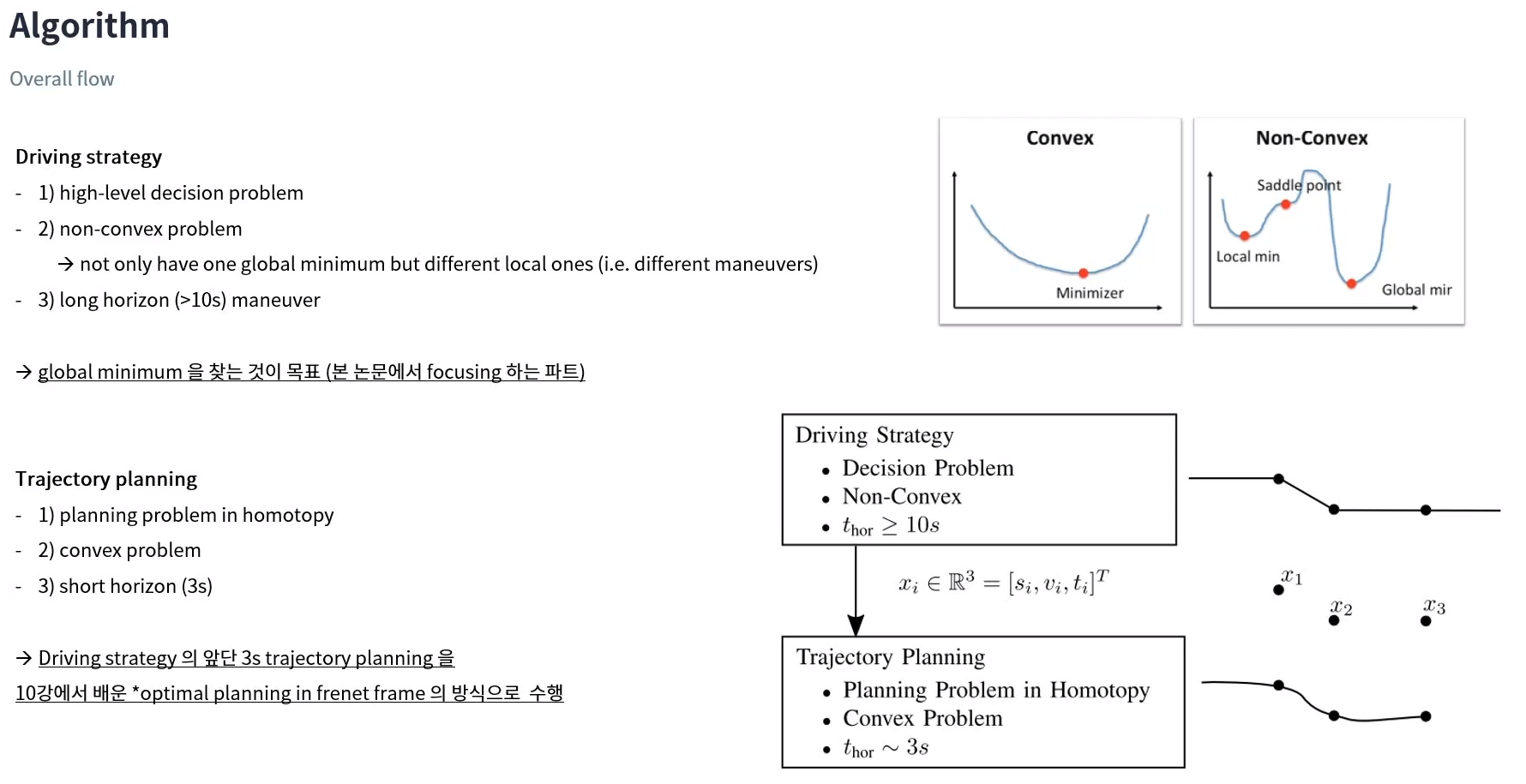
기존에는 rule based logic 들이 많았는데 이 논문은 driving strategy 를 먼저 구한후에 trajectory planning 을 통해서 실제로 자동차들이 따라가야하는 구체적인 path를 알아낸다.

driving strategy 를 정할떄 이미 path 가 정해져있고 어떤 속도 , 가속도 로 움직여야하는지 를 정하는 것을 주행 전략을 새운다고 한다. 오른쪽 그림을 보면 obstacle 앞에 정지 해야함으로 점점 가속도를 줄이는 action 을 택하는 것을 확인 할 수 있다.

위의 cost for collision 을 정할떄 쓰이는 E는 static , dynamic 2개로 나뉘어진다.
static 은 일정위치에서 일정시간동안 점유하는 것 , dynamic 은 변하는 위치 s(t) 에서 일정시간 동안 점유하는 것

figure 2를 보면 rule based가 아닌 A star 알고리즘으로 주어진 s-t domain의 정보를 가지고 감속하는 주행을 하는 것을 확인 할 수 있다.
figure 3를 보면 1초후의 static event 가 끝나는것을 고려해서 미리 가속하는 속도 profile 을 만든다.
'자율주행 > 차량제어' 카테고리의 다른 글
| 외국 기업 사례 (모듈화 보다는 딥러닝 기반) (0) | 2021.02.04 |
|---|---|
| Optimal frenet planning algorithm (0) | 2021.02.03 |
| Path Planning Algorithms (0) | 2021.02.03 |
| MPC(model predictive control) (2) | 2021.02.02 |
| PID ,Kalman (0) | 2021.02.02 |