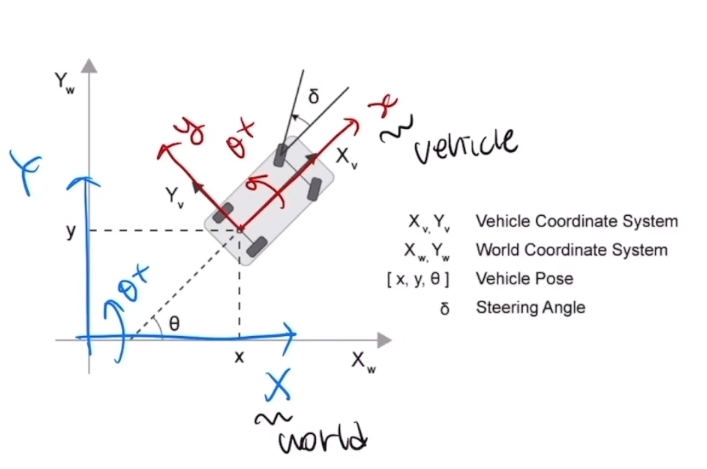
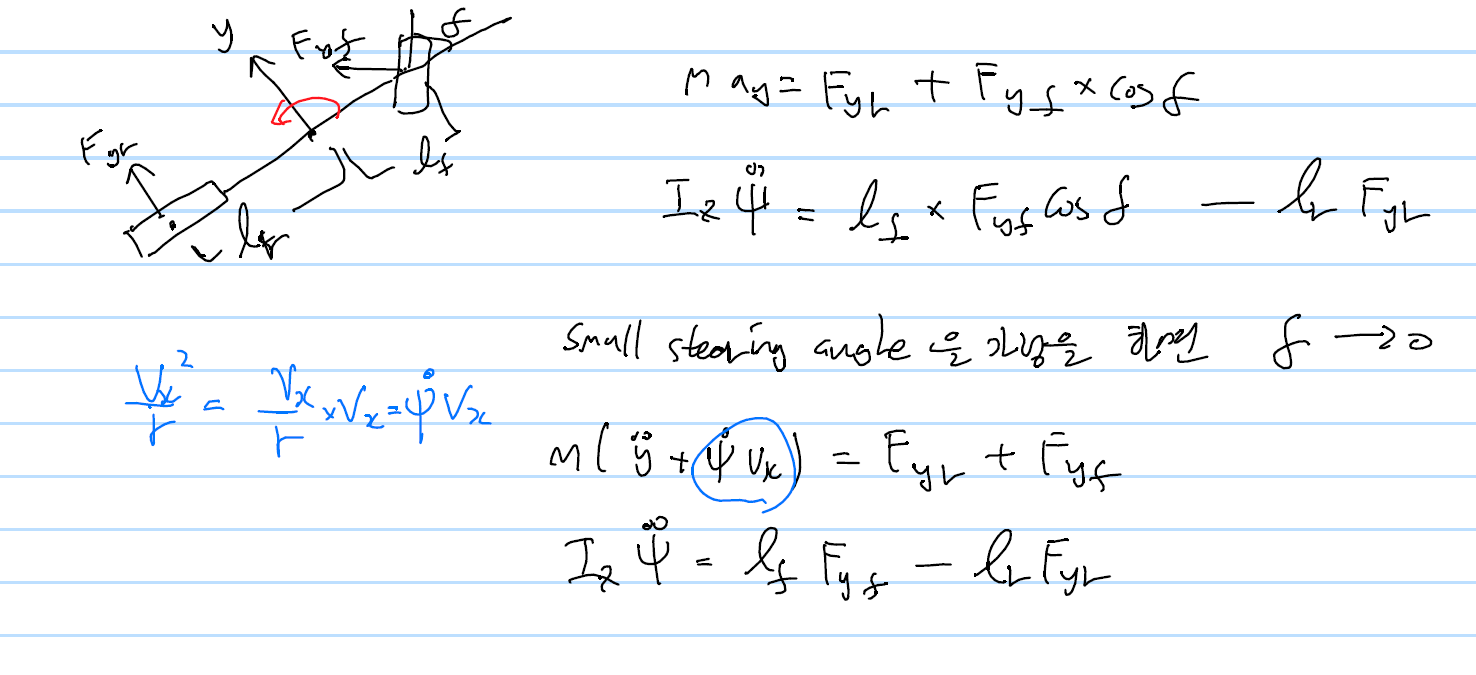
오른손 법칙을 따라서 하는것이 국룰이다.
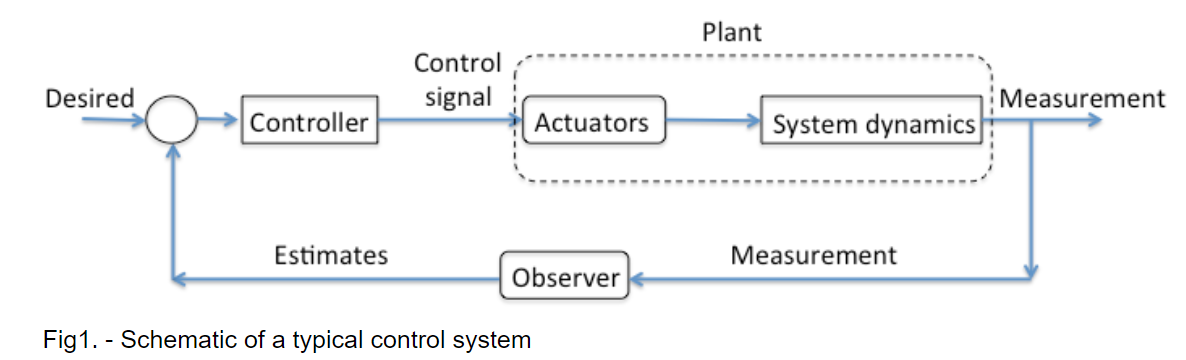
Plant == physical system that we want to behave in a certain manner. Position, Orientation , velocities form the states of the car (input). other things like car's mass , wheel diameter are parameter.
Observer == Observers are used to convert meausrement into state estimates. how to best estimate the speed of car given the measurements of the rotational speed of the wheel. also it is better to use sensor fusion
Actuation == Actuators are devices taht interact with a plant and chagne its inherent states. throttle is one of them. actuation system cannot directly apply the commanded control because of lag in response.
Control Law == law that governs how the estimates are converted to signals to be sent to the actuators.
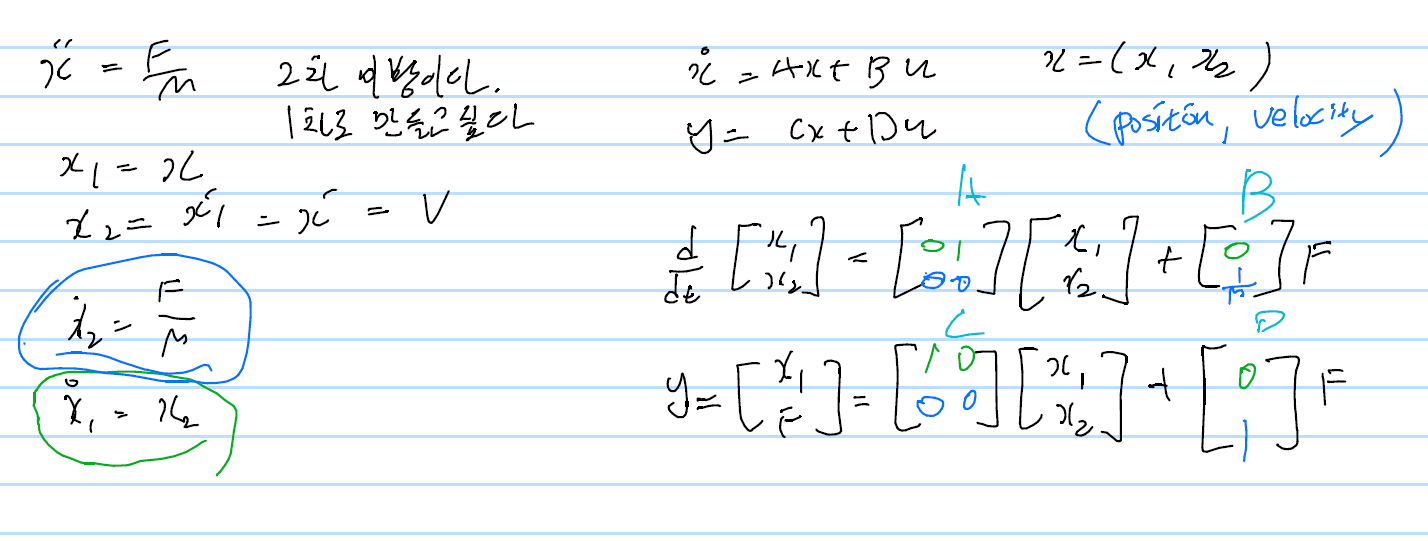
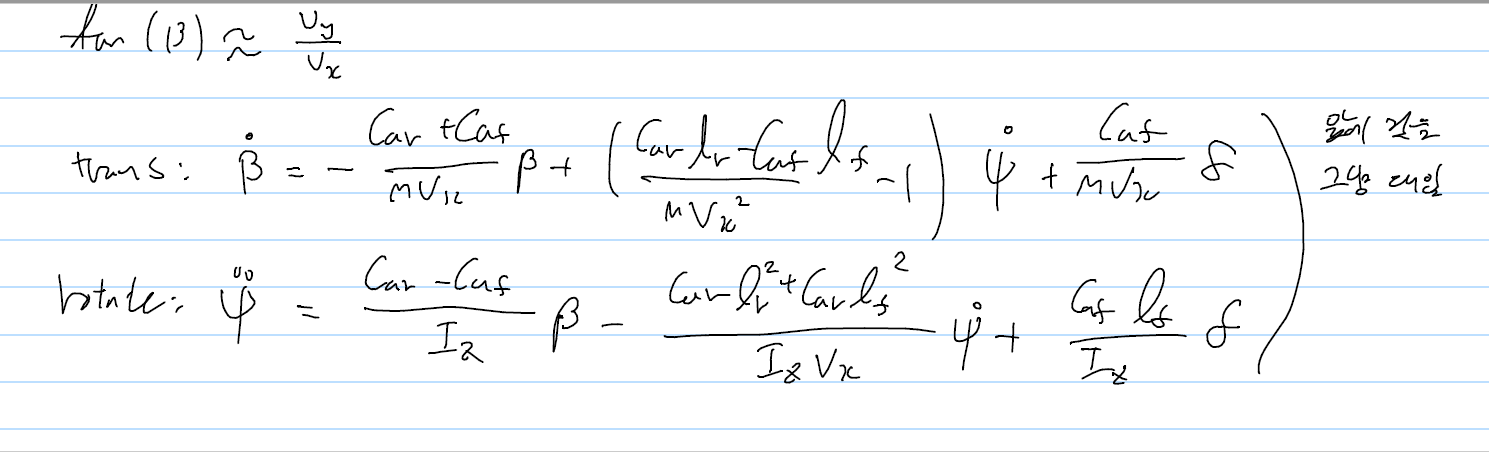
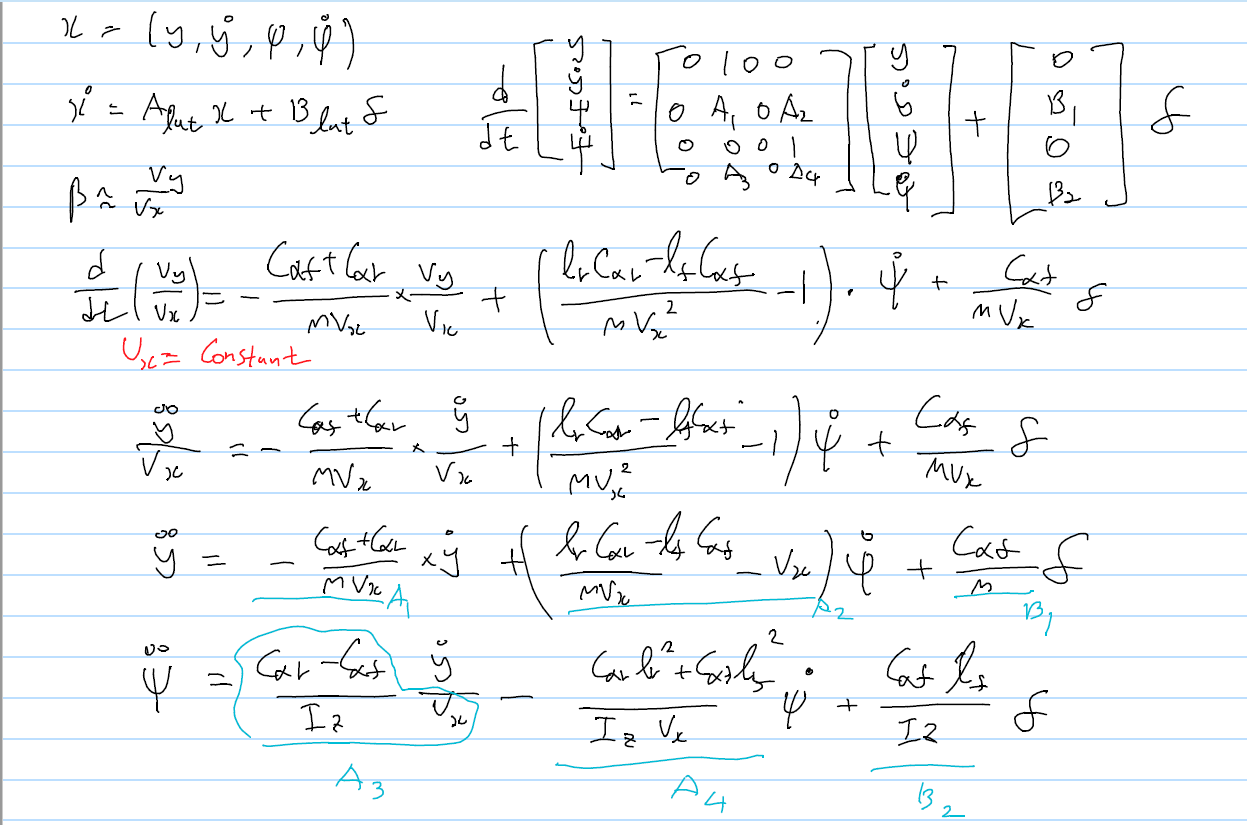
State space equation

우리가 나타내고 싶어하는 모델링을 표현 할 수 있는 방정식이다. 주로 1차 미방으로 표현이 된다.




'자율주행 > 차량제어' 카테고리의 다른 글
| A generic driving strategy for urban environment (0) | 2021.02.03 |
|---|---|
| Optimal frenet planning algorithm (0) | 2021.02.03 |
| Path Planning Algorithms (0) | 2021.02.03 |
| MPC(model predictive control) (2) | 2021.02.02 |
| PID ,Kalman (0) | 2021.02.02 |