#include <ros/ros.h>
#include <interactive_markers/interactive_marker_server.h>
void processFeedback(
const visualization_msgs::InteractiveMarkerFeedbackConstPtr &feedback )
{
ROS_INFO_STREAM( feedback->marker_name << " is now at "
<< feedback->pose.position.x << ", " << feedback->pose.position.y
<< ", " << feedback->pose.position.z );
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "simple_marker");
// create an interactive marker server on the topic namespace simple_marker
interactive_markers::InteractiveMarkerServer server("simple_marker");
// create an interactive marker for our server
visualization_msgs::InteractiveMarker int_marker;
int_marker.header.frame_id = "base_link";
int_marker.header.stamp=ros::Time::now();
int_marker.name = "my_marker";
int_marker.description = "Simple 1-DOF Control";
// create a grey box marker
visualization_msgs::Marker box_marker;
box_marker.type = visualization_msgs::Marker::CUBE;
box_marker.scale.x = 0.45;
box_marker.scale.y = 0.45;
box_marker.scale.z = 0.45;
box_marker.color.r = 0.5;
box_marker.color.g = 0.5;
box_marker.color.b = 0.5;
box_marker.color.a = 1.0;
// create a non-interactive control which contains the box
visualization_msgs::InteractiveMarkerControl box_control;
box_control.always_visible = true;
box_control.markers.push_back( box_marker );
// add the control to the interactive marker
int_marker.controls.push_back( box_control );
// create a control which will move the box
// this control does not contain any markers,
// which will cause RViz to insert two arrows
visualization_msgs::InteractiveMarkerControl rotate_control;
rotate_control.name = "move_x";
rotate_control.interaction_mode =
visualization_msgs::InteractiveMarkerControl::MOVE_AXIS;
// add the control to the interactive marker
int_marker.controls.push_back(rotate_control);
// add the interactive marker to our collection &
// tell the server to call processFeedback() when feedback arrives for it
server.insert(int_marker, &processFeedback);
// 'commit' changes and send to all clients
server.applyChanges();
// start the ROS main loop
ros::spin();
}
basically you have your base_link == int_marker
and you append box_marker, box_control, rotate_control
and than you need to edit CMakeLists.txt
find_package(catkin REQUIRED COMPONENTS
roscpp
visualization_msgs
interactive_markers
)
. . .
add_executable(simple_marker src/simple_marker.cpp)
target_link_libraries(simple_marker ${catkin_LIBRARIES})
also package.xml
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>visualization_msgs</build_depend>
<build_depend>interactive_markers</build_depend>
<build_depend>tf</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>visualization_msgs</build_export_depend>
<build_export_depend>interactive_markers</build_export_depend>
<build_export_depend>tf</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>visualization_msgs</exec_depend>
<exec_depend>interactive_markers</exec_depend>
<exec_depend>tf</exec_depend>
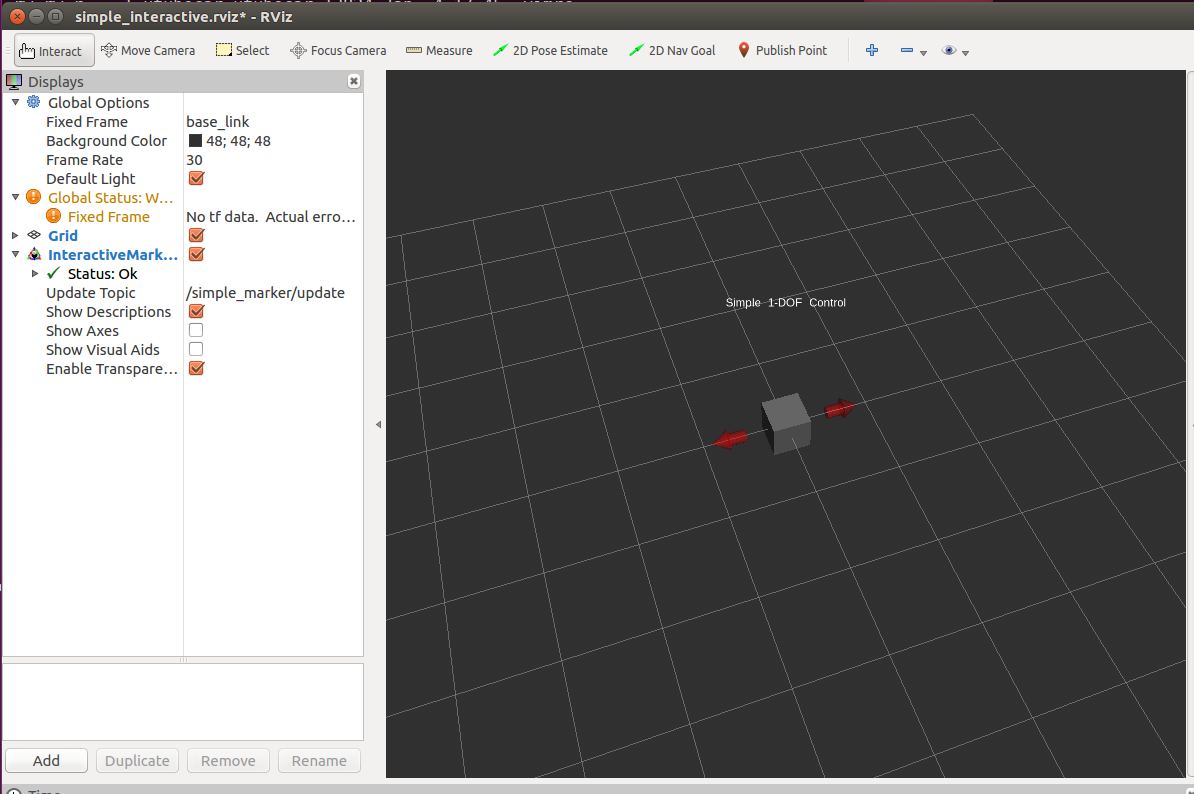
you can now interact with cube and move it according to x axis.
'자율주행 > ROS tutorial C++' 카테고리의 다른 글
| Markers:Points and Lines (0) | 2021.02.07 |
|---|---|
| Markers: Basic shapes (0) | 2021.01.10 |
| Writing a Simple Service and Client (0) | 2020.12.30 |
| Writing a Simple Publisher and Subscriber (0) | 2020.12.30 |